





力反馈技术用于再现人对环境力觉的感知。在人的五大感官中力觉或触觉是人体感官中唯一具有双向传递信息能力的信息载体。借助于力觉交互设备,人们可以真实的按照人类的肢体语言进行人机自然互动和信息交流,通过应用力反馈设备,可以获得和触摸实际物体时相同的运动感,从而产生更真实的沉浸感。
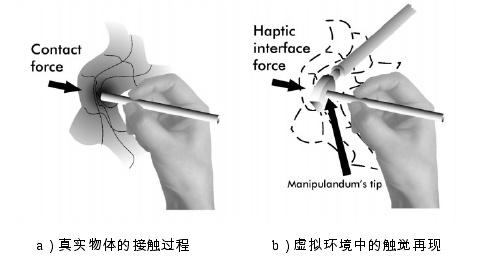
如图为一个真实的物体,受短棒接触力的作用后会发生弹性形变产生如图所示的反作用力;图b,力反馈装置则需要模拟真实物体受力以及产生反作用力的物理过程,一方面获取人通过短棒向虚拟物体施力状态信息,比如位置或着力的信息,同时利用反应被接触物体物理属性的参考模型计算其在接触或发生形变或可能产生的反作用力的大小和方向,由此产生力控信号,并通过装置中的执行器计算出来的反馈力作用到人手,从而在虚拟环境下实现触觉真实物体的触觉再现。
力反馈实现的原理就是通过感知人的行为模拟出相应的力、震动或被动的运动,反馈给使用者,这种机械上的刺激可以帮助我们从力觉触觉上感受到虚拟环境中的物体,可以更加真实地体验到力反馈设备反馈给操作者的力及力矩的信息,使操作者能感收到作用力。
触觉的再现是一个力反馈的过程,通过利用由计算机控制的机械装置,及力反馈装置,或触觉交互装置来实现。力反馈装置通过驱动装置向使用者输出反馈的作用力,将真实物体被接触或被受力时的状态以力的形式再现到人的手或肢体上来实现力觉的交互。
从结构上划分,力反馈系统主要有用户、力反馈装置、和主计算机和前端机器人组成。其中,力反馈装置是连接用户和工作环境的桥梁,他的主要功能一方面是利用传感器测量用户在使用个过程中的运动和位置信息,并将其实时传送给主计算机;另一方面,接收来自主计算机的力觉或运动信号,通过执行器件将产生的力感反馈给用户。主计算机主要用来生成环境中的三维视觉图像,同时完成力觉与触觉的计算,实现与用户操作的实时交互。
由于力反馈的出现,在虚拟现实技术中交互设备从听觉、视觉扩展到了力觉方面。力反馈技术被广泛应用到医疗,航空行天技术,纳米技术、培训以及娱乐等方面。